| About |
| Features |
| Download |
| Documentation |
| Screenshots |
| Future |
| FAQ |
| Contact |

The HuMAnS Toolbox

Screenshots
Simulation result using the Scilab graphic tools:
|
This picture shows the general 3D stick figure that can be obtained with the Scilab graphic tools. It can represent at will a simulated or reconstructed position or motion. The different contact forces, their sum and the position of the center of mass are drawn as well. |
For a better visualization, VRML files and the corresponding MPEG movies can be generated as well:
BipOneStep application
|
This sample application shows the Bip robot performing dynamically a statically stable step with the help of a task function control law taking care of the contact forces. (VRML) (MPEG) |
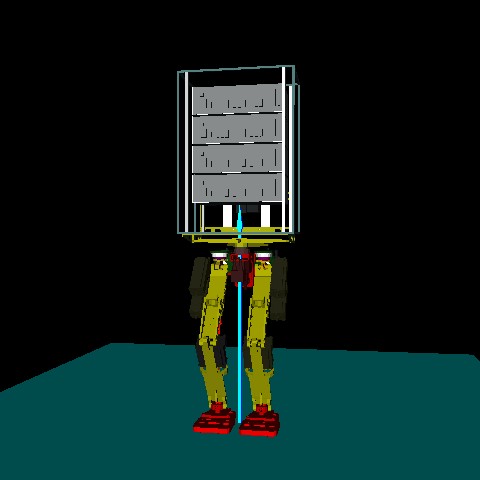
HRP2Demo application
|
This sample application shows the HRP2 robot grabbing something down and putting it up on a shelf. The trajectory is an interpolation between keyframes, tracked with a Computed Torque control law. (MPEG) |
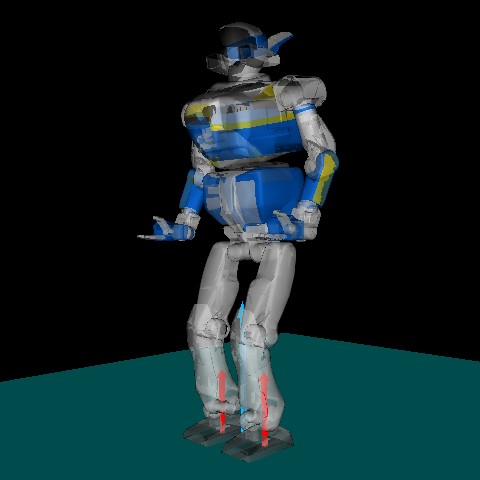
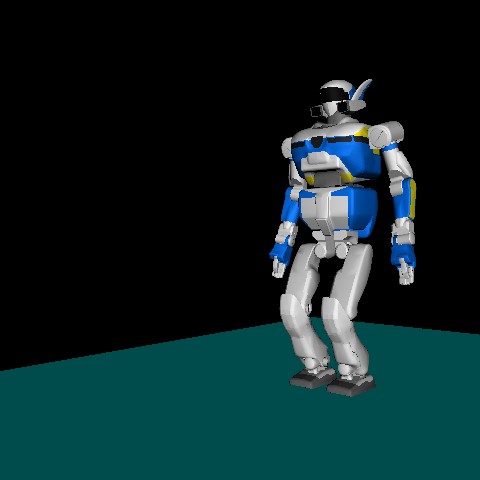
HRP2GenTraj application
|
This sample application shows the HRP2 robot performing a dynamically stable 3D walk. (MPEG) |
KondoOneFoot application
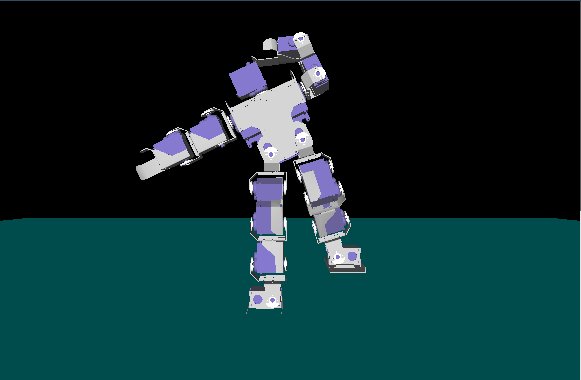
|
This sample application shows the Kondo robot standing on one foot and then on the other. The trajectory is an interpolation between keyframes generated by Jacadi, tracked with ComputedTorqueControl of the DelayedSampling ActuationModel. A similar trajectory has been tested on the real robot (mp4). (VRML) (MPEG) |
ChairSitToStand application
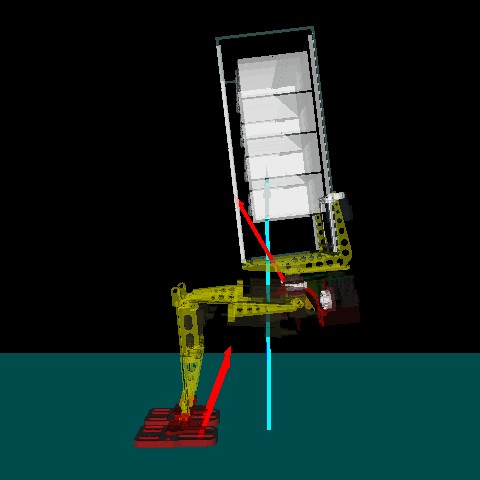
|
This sample application shows a robot balancing on a chair with contacts of the feet on the ground and of the hips on the chair. It uses a ComputedTorque control law, but without any dynamic of actuation. Note that the center of pressure on the ground (sometimes called the ZMP) goes outside of the vertical projection of the contact points on the ground, what is normal considering the different heights of these contact points. (VRML) (MPEG) |
SpaceWalk application
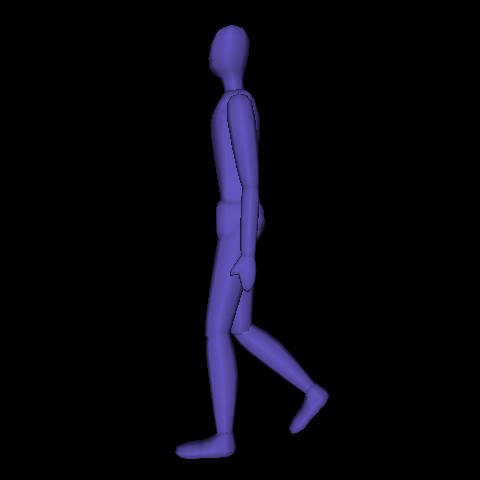
|
This sample application shows a person performing walking movements in space, that is without gravity and without contacts. The conservation of the translation momentum implies that the center of mass of the person doesn't move, but the conservation of the rotation momentum doesn't imply that the body doesn't rotate. This is because of the non-holonomy of this latter conservation law. It is this non-holonomy which is used by cats in order to always fall down on their legs. (VRML) (MPEG) |
FESSwingUp application
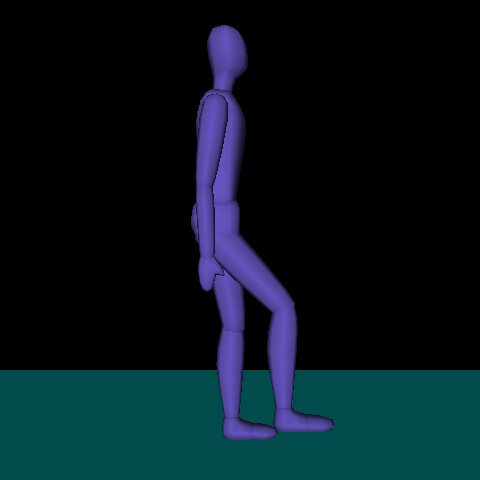
|
This sample application shows the effect of an alternation of contractions of quadricep and hamstring of the right leg when the human's position is completely rigid except for the right knee. It uses the muscle contraction model developed by the DEMAR team. This model presents hybrid dynamics that can be precisely simulated by the HuMAnS kernel. (VRML) (MPEG) |
H36Reconstruction application
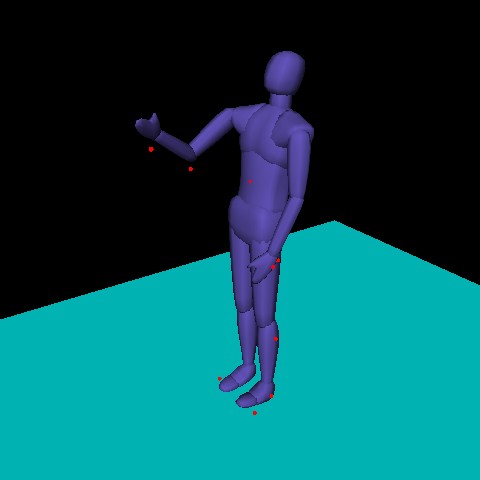
|
This sample application shows the reaction of a person keeping balance and keeping the right hand at a prescribed position while being pushed in the back. This motion has been reconstructed with the help of the Human36 biomechanical model from the 3D positions of a set of optical markers attached to the person, appearing here as red dots, that have been recorded during a real experiment aiming at studying the neurophysiology of the coordination of human motion. (VRML) (MPEG) |
RX90Circle application
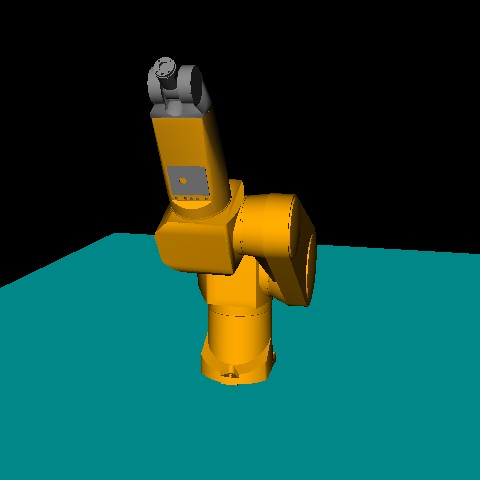
|
This sample application shows a RX90 manipulator robot tracking a circle with its end effector at a constant orientation. The control law simulated here for the tracking is a Computed Torque realized in the Cartesian space, also known as a Task Function Control. (VRML) (MPEG) |
PA10Infinity application
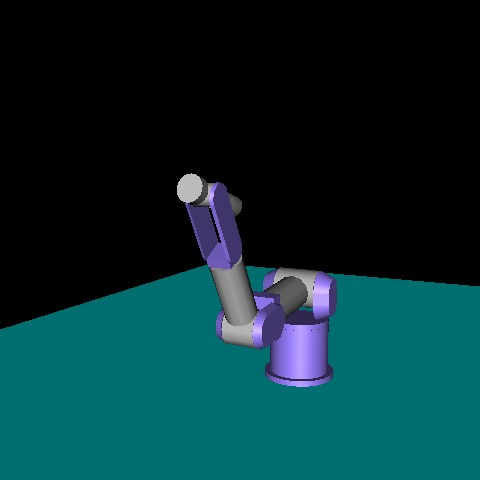
|
This sample application shows a PA10 manipulator robot tracking an "infinite" loop with its end effector at a constant orientation. The control law simulated here for the tracking is a Computed Torque realized in the Cartesian space, also known as a Task Function Control. (VRML) (MPEG) |